快速开始
环境依赖
系统环境
推荐在Ubuntu 22.04 系统,ros2 humble 版本 下进行开发调试,支持在D1 内置电脑上进行开发,也可以在D1 外接电脑进行开发。
网络环境
需将用户自备一根USB type-c 线束,插入距离网口最近的type-c口,输入以下信息,即可进入机器人系统
ssh robot@192.168.42.1
#密码 : ddt
详细说明请查看产品使用说明书,用户电脑与D1机器人通讯的网卡在192.168.42.xxx网段下,自动分配ip,无需配置。
警告
1、 使用windows系统的用户在USB type-c 线束后,无法识别 usb 网卡,因为缺少相关驱动,请自行安装:https://milkv.io/zh/docs/duo/getting-started/setup# 2、 禁止使用使用刷机线进行调试,以免误操作,使系统进入刷机模式,系统无法正常启动。
wifi热点连接
在下载ros 包和其他依赖时,需要将机器人连接网络,能正常联网,操作如下:
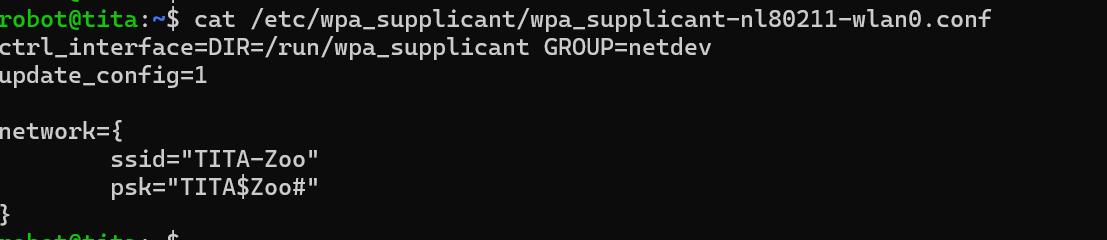
1.首先 `sudo vim /etc/wpa_supplicant/wpa_supplicant-nl80211-wlan0.conf`
2.修改图中,ssid= "WIFI name"; psk="PassWord"
3.修改完后 重启系统
例子如图:
wifi ap热点模式
详细参见wifi热点模式
网口配置
此配置针对想通过网口网线外接电脑与D1机器人进行数据交互。
sudo apt update
sudo apt install network-manager
下载配置文件:
sudo apt-get install git #如果没有安装git,请先安装
git clone https://github.com/DDTRobot/TowerNetworkManager.git
安装:
cd TowerNetworkManager/
chmod 777 install.sh
sudo ./install.sh
sudo rm -rf /etc/wpa_supplicant/wpa_supplicant-nl80211-wlan0.conf #删除原有wifi配置文件,以免影响网络连接,后续联网使用 sudo nmcli device wifi connect "example" password "1111111" 方式连接
完成以上步骤后,通过ifconfig能看到eth0自动分配IP 192.168.19.97,外部设备会被自动分配 192.168.19.xx 网段的ip。
安装编译工具
在D1内置系统开发编译工具colcon build 安装:
sudo apt update
sudo apt-get install python3-colcon-common-extensions
遇到无法安装python3-colcon-common-extensions需要配置以下内容
创建或编辑一个配置文件:
```
sudo vim /etc/apt/apt.conf.d/99insecure
```
添加以下内容:
```
Acquire::AllowInsecureRepositories "true";
Acquire::AllowDowngradeToInsecureRepositories "true";
```
然后再次运行`sudo apt update`。
ROS2 SDK
D1_sdk_ros2 是基于ROS2开发,将高层逻辑封装成ROS2节点,提供ROS2 API给用户使用,用户通过ROS2 topic 发送指令给机器人,完成机器人控制。
查看ros话题
robot@d1:~$ ros2 topic list
/d13007137/command/cmd_key # 控制指令,状态机切换
/d13007137/command/cmd_pose # 控制指令,位姿
/d13007137/command/cmd_twist # 控制指令,速度
/d13007137/command/joint_command # 控制指令,速度
/d13007137/d1_rl_controller/transition_event
/d13007137/d1h_rl_controller/transition_event
/d13007137/dynamic_joint_states
/d13007137/imu_sensor_broadcaster/imu # imu状态
/d13007137/imu_sensor_broadcaster/transition_event
/d13007137/joint_state_broadcaster/transition_event
/d13007137/joint_states # 关节信息 位置速度力据
/d13007137/joy # 遥控器stick值相关
/d13007137/rl_controller/fsm # rl控制器状态机
/d13007137/rl_controller/joint_command # rl控制器实际输出:kp kd p v t
/d13007137/robot_description
/d13007137/system_status_broadcaster/battery1 # 主机电池信息
/d13007137/system_status_broadcaster/battery2 # 从机电池信息
/d13007137/system_status_broadcaster/dock # 拼接机构状态
/d13007137/system_status_broadcaster/motors_status # 电机状态
/d13007137/system_status_broadcaster/transition_event
/parameter_events
/rosout
/tf
/tf_static
如果没有,将下文添加在~/.bashrc结尾后执行source ~/.bashrc再输入查看ros话题命令
export ROS_LOCALHOST_ONLY=1
export ROS_DOMAIN_ID=42
source /opt/ros/humble/setup.bash
source /opt/d1_ros2/setup.bash
获取四足控制器/双足控制器状态
获取状态
source /opt/d1_ros2/namespace.sh
ros2 service call /$ROBOT_NS/command/get_controller_status std_srvs/srv/Trigger
# requester: making request: std_srvs.srv.Trigger_Request()
# response:
# std_srvs.srv.Trigger_Response(success=True, message='biped') # quadruped代表四足
设置状态
source /opt/d1_ros2/namespace.sh
ros2 service call /$ROBOT_NS/command/set_controller_status std_srvs/srv/SetBool data:\ false # true 代表四足, false 代表双足
# requester: making request: std_srvs.srv.SetBool_Request(data=False)
# response:
# std_srvs.srv.SetBool_Response(success=True, message='biped')
上层command_sdk 接口
08 SDK Mode带*后遥控不发送command话题,可由用户发送话题来控制机器状态机切换,速度控制。
例程参考: https://github.com/DDTRobot/D1-ROS2-SDK-Demo.git
切换sdk模式
source /opt/d1_ros2/setup.bash
source /opt/d1_ros2/namespace.sh
# 开启sdk模式
ros2 param set /$ROBOT_NS/teleop_command use_sdk true
# 关闭sdk模式
ros2 param set /$ROBOT_NS/teleop_command use_sdk false
command/user_command使用一个话题来进行机器人状态机切换,速度控制,位姿控制
机器人状态机切换:状态机包含以下:
transform_up,transform_down,loco,joint_pd,car,rl_1,rl_2,rl_3,jump
说明:
1、双轮足的状态切换,包含以下:transform_up transform_down、car、 loco,而idle是空闲状态,transform_down之后,自动转入idle状态。
2、四轮足的状态切换,包含以下:transform_up、transform_down、 loco,而idle是空闲状态,transform_down之后,自动转入idle状态。
示例:
source /opt/d1_ros2/setup.bash
source /opt/d1_ros2/namespace.sh
# 站立
ros2 topic pub /$ROBOT_NS/command/user_command ddt_msgs/msg/UserCommand "{
fsm_mode : 'transform_up'
}"
# 趴下
ros2 topic pub /$ROBOT_NS/command/user_command ddt_msgs/msg/UserCommand "{
fsm_mode : 'transform_down'
}"
# 平地
ros2 topic pub /$ROBOT_NS/command/user_command ddt_msgs/msg/UserCommand "{
fsm_mode : 'loco'
}"
# 策略1
ros2 topic pub /$ROBOT_NS/command/user_command ddt_msgs/msg/UserCommand "{
fsm_mode : 'rl_1'
}"
速度控制
source /opt/d1_ros2/setup.bash
source /opt/d1_ros2/namespace.sh
ros2 topic pub /$ROBOT_NS/command/user_command ddt_msgs/msg/UserCommand "{
header: 'auto',
twist: { linear: { x: 0.0, y: 0.0, z: 0.0 }, angular: { x: 0.0, y: 0.0, z: 0.5 } }
}"
此时机器以一定的恒速自转。 实际最大速度由内部控制器决定,此处为指令输入最大限制。以四足为例:lin_vel_x为3.0(m/s)、max_twist_angular: 6.0(rad/s)
位姿控制
source /opt/d1_ros2/setup.bash
source /opt/d1_ros2/namespace.sh
ros2 topic pub /$ROBOT_NS/command/user_command ddt_msgs/msg/UserCommand "{
header: 'auto',
pose: {
position: {x: 0.0, y: 0.0, z: 0.0}, # 暂时不可控
orientation: {x: 0.0, y: 0.171, z: 0.0, w: 0.985}
}
}"
此时头部应该低下一定角度。 此处指令输入最大限制:
max_roll: 0.2
max_pitch: 0.4
关节控制
新增关节控制接口,控制器进入到debug状态,先发送
source /opt/d1_ros2/namespace.sh
source /opt/d1_ros2/setup.bash
ros2 topic pub /$ROBOT_NS/command/user_command ddt_msgs/msg/UserCommand "{
fsm_mode : 'debug'
}"
此时:

source /opt/d1_ros2/namespace.sh
source /opt/d1_ros2/setup.bash
ros2 topic pub /$ROBOT_NS/command/joint_command ddt_msgs/msg/JointControlCommand "{
header: 'auto',
name: ['FL_foot_joint'],
kp: [0.0],
kd: [0.5],
position: [0.0],
velocity: [1.0],
effort: [0.0]
}" --rate 10
此时可以发现左腿轮子在旋转,Ctrl+c后停止旋转
策略替换
将你的policy拷贝在对应的文件夹下,例如test.onnx放在
双足/opt/d1_ros2/share/rl_controller/config/d1h
四足/opt/d1_ros2/share/rl_controller/config/d1
修改配置文件 以双轮足为例,vim /opt/d1_ros2/share/rl_controller/config/d1h/controller.yaml如下,在rl_policy_names中插入你的策略,例如test_policy,然后在rl_policy_names最下面新增字段如下所示。或者直接修改原有的策略,例如双轮足下的rl_climb字段
...
rl_policy_names:
...
- "test_policy"
...
test_policy:
policy_path: config/d1h/test.onnx
output_name: "nn_output"
# env
num_obs: 31
num_actions: 8
history_len: 10
observations_name: ["ang_vel", "gravity", "commands", "dof_pos_nwp", "dof_vel", "last_actions"]
commands_name: ["lin_vel_x", "lin_vel_y", "ang_vel_z"]
commands_scale: [2.0, 2.0, 0.25] # lin_vel_scale, lin_vel_scale, ang_vel_scale
max_commands: [1.0, 0.7, 1.0]
min_commands: [-0.5, -0.7, -1.0]
commands_comp: [0.0, 0.0, 0.0] # direct add offset to command
# control parameters
time_interval: 0.02 # forward thread seconds
default_joint_angles: [0.0, 0.8, -1.5, 0.0, 0.0, 0.8, -1.5, 0.0]
joint_kp: [40.0, 40.0, 40.0, 10.0, 40.0, 40.0, 40.0, 10.0]
joint_kd: [1.2, 1.2, 1.2, 0.6, 1.2, 1.2, 1.2, 0.6]
action_scales: [ 0.25, 0.5, 0.5, 0.5, 0.25, 0.5, 0.5, 0.5 ]
lin_vel_scale: 2.0
ang_vel_scale: 0.25
dof_pos_scale: 1.0
dof_vel_scale: 0.05
# Compensation items
output_torque_scale: 1.0
修改后重启service,systemctl restart d1_bringup后,查看journal中是否有正确加载在对应按键上journalctl -u d1_bringup
[×××_d1-5] [INFO] [2026-01-30 18:27:10] [d1h_rl_controller]: Get policy: /opt/d1_ros2/share/rl_controller/config/d1h/test.onnx in "rl_1" fsm
备注
注意以下事项:
对于四足,出厂默认平地模式使用强化控制,因此policy_loco_name字段必须不为空且对应的字段必须在rl_policy_names中出现。其他policy_jump_name,policy_recovery_name也是使用强化学习实现的,如果使用则需要在rl_policy_names中注册对应名字的policy并且在policy_jump_name,policy_recovery_name中声明,不声明则使用内置默认值(如果有)
已经在policy_jump_name,policy_recovery_name和policy_recovery_name注册过的rl_policy_names在rl_*按键中不会被映射上,剩下的策略则按照先后顺序映射在对应的rl_*中。
双足policy_loco_name默认使用lqr为非强化学习控制器。
...
policy_jump_name: "rl_forward_jump"
policy_loco_name: "rl_flat_np3o_still"
policy_recovery_name: "rl_recovery_np3o"
rl_policy_names:
- "rl_flat_np3o_still"
...
...
LQR参数修改
在双轮足模式下,通过vim /opt/d1_ros2/share/rl_controller/config/d1h/controllers.yaml中的lqr_controller可以修改LQR参数 目前提供了以下几种LQR参数可供修改
参数名 |
默认值 |
|
|---|---|---|
最大前进速度 |
forward_velocity_max |
2.1 |
最大旋转速度 |
otate_velocity_max |
3.0 |
最大前进加速度 |
forward_acceleration_max |
3.0 |
最大旋转加速度 |
rotate_acceleration_max |
6.0 |
最大变形速度 |
transform_velocity_max |
0.2 |
质心相关参数 |
x_mass1(x_mass2) |
-0.002 |
根据机器前后机对质心参数进行手动修改 后机使用默认参数即可 前机将参数修改如下
x_mass1: -0.01
z_mass1: 0.0
x_mass2: -0.01
z_mass2: 0.0
修改后重启生效