遥控器说明

想详细了解如何进行遥控器配对,请查看遥控器配对
常用组合
双轮足模式(默认)
模式选择(mode) |
启动按键 |
三级开关(左) |
三级开关(右) |
描述 |
左摇杆 |
右摇杆 |
|---|---|---|---|---|---|---|
不选 |
按下 |
中 |
任意 |
高度调节 |
前进及转弯 |
前推升高、后推降低 |
不选 |
按下 |
上 |
上 |
俯仰调节 |
前进及转弯 |
前推抬头、后推低头 |
03 (skill 1) |
按下 |
中 |
任意 |
RL平地模式 |
前进及转弯 |
侧走 |
04 (skill 2) |
按下 |
中 |
任意 |
RL上楼梯模式 |
前进及转弯 |
无效 |
06 (crawl mode) |
弹起 |
任意 |
任意 |
车模式 |
前进及转弯 |
无效 |
四轮足模式(默认)
模式选择(mode) |
跳跃按键 |
三级开关(左) |
三级开关(右) |
描述 |
左摇杆 |
右摇杆 |
|---|---|---|---|---|---|---|
不选 |
弹起 |
中 |
任意 |
RL平地模式 |
前进及转弯 |
侧走 |
03 (skill 1) |
弹起 |
中 |
任意 |
RL上楼模式 |
前进及转弯 |
侧走 |
04 (skill 2) |
弹起 |
中 |
任意 |
RL 高台模式 |
前进及转弯 |
无效 |
不选 |
按下 |
中 |
任意 |
旋转跳跃模式 |
无效 |
无效 |
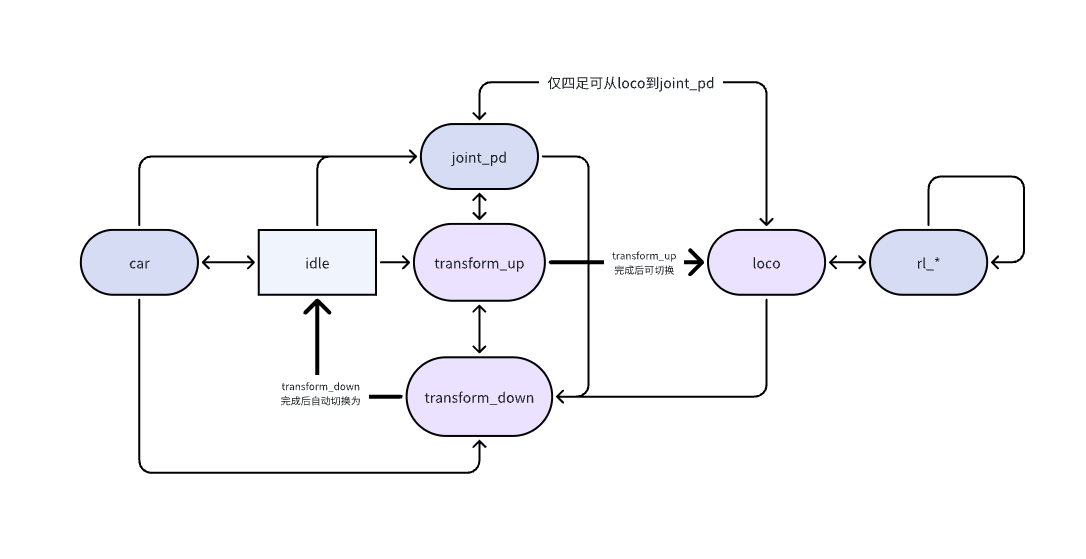
状态机
控制器内部状态机流转如下图所示,箭头方向表示可从A状态切换到B状态,四足控制无car状态机。部分在菜单内显示的状态机星号表示处于当前状态机(03到07)。
遥控器菜单页
1、进入菜单页
按下右侧按键进入菜单页,如下图:
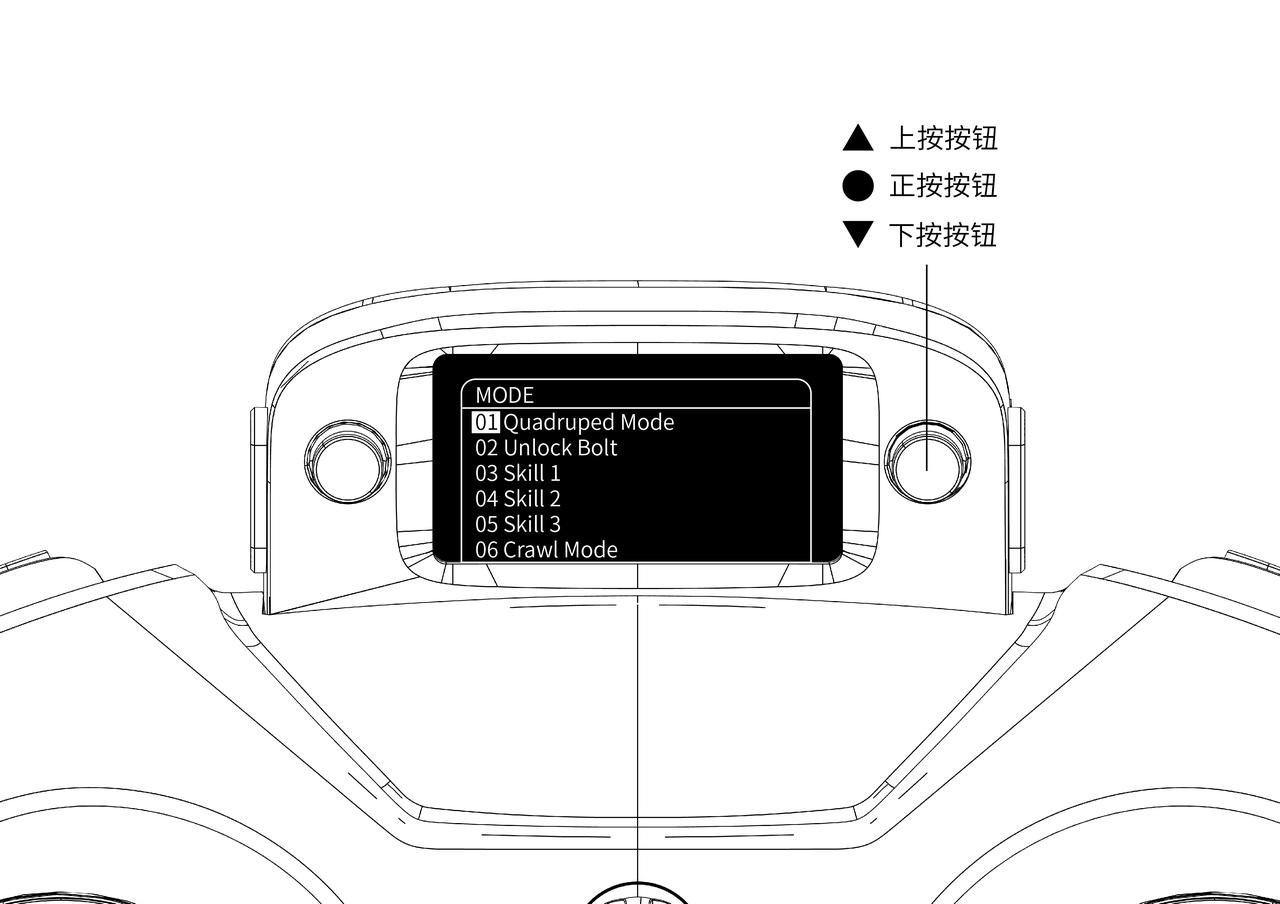
进入菜单,界面如上, 功能分别为:
01 切换四足模式(本质为上述*.service切换)
02 解锁拼接机构(先切换为双轮足后解锁)
03 强化控制策略1(双轮足侧走/四轮足爬楼梯)
04 强化控制策略2(双轮足爬台阶/四轮足爬高台)
05 强化控制策略3(未启用)
06 匍匐模式(双轮足启用)
07 锁定关节
08 joystick sdk mode,关闭ros2 command话题发布
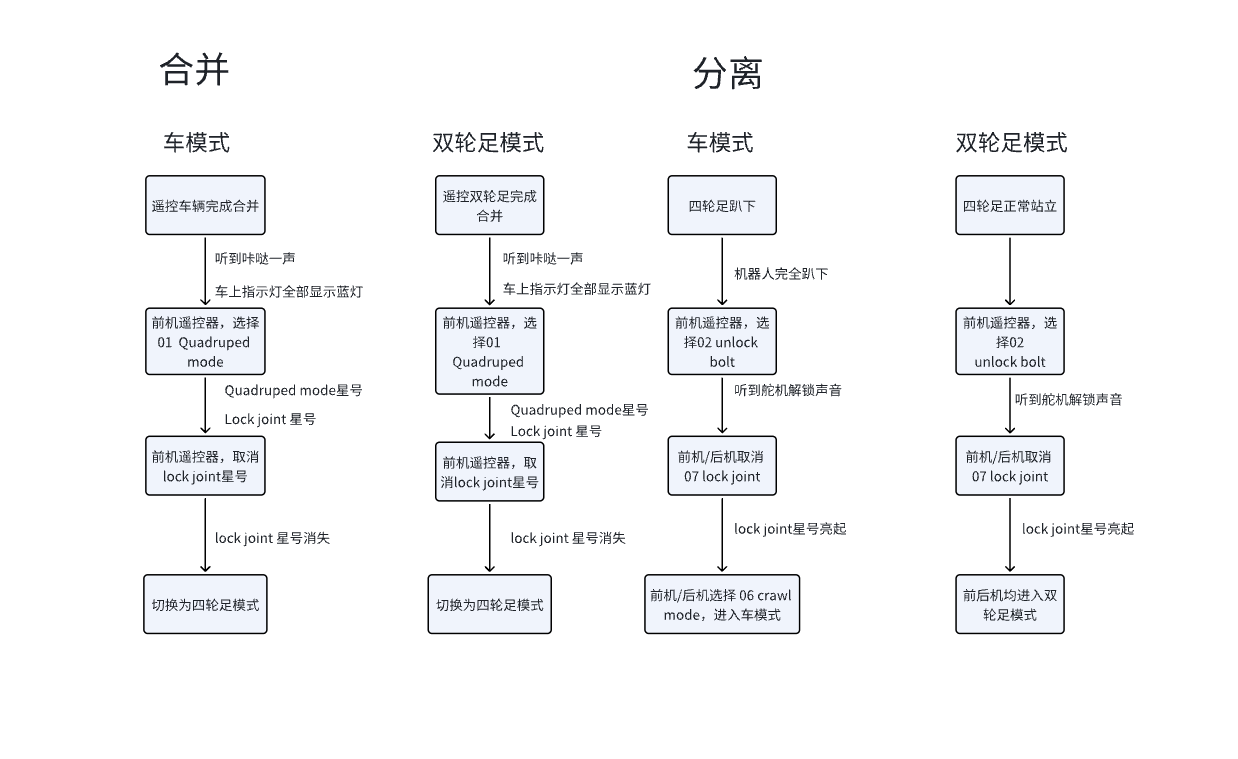
解锁/拼接切换
配置修改
遥控器
基于ROS2框架,修改对应文件来下的yaml文件来配置,下述为遥控器一些相关配置:
运动控制
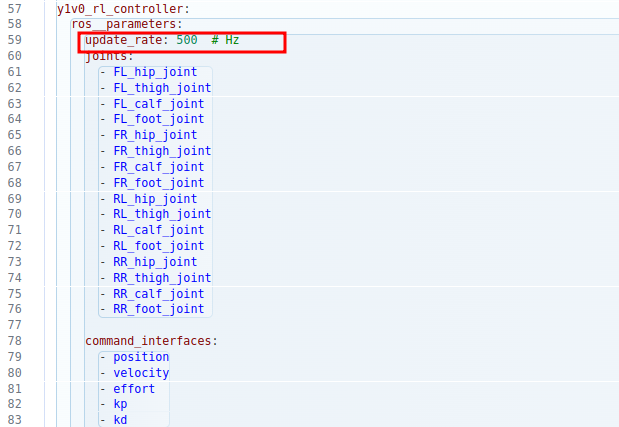
修改控制频率
vim /opt/y1_ros2/share/rl_controller/config/y1v0/controllers.yaml修改四轮足vim /opt/y1_ros2/share/rl_controller/config/y1v0h_evt1/controllers.yaml修改双轮足 查找对应update_rate字段,修改对应控制器中update_rate整形值(控制频率,Hz)目前默认为500Hz。修改controller_manager和*_rl_controller)下的update_rate后重启即可。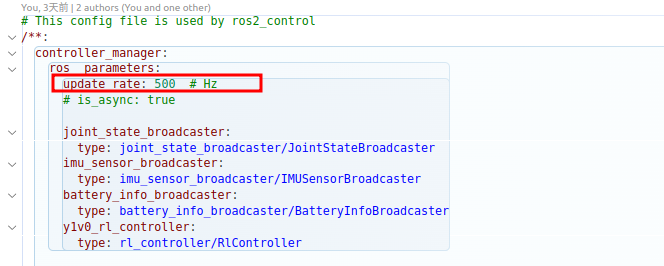
ERROR CODE
错误码 |
说明 |
版本 |
|---|---|---|
0x1000 |
第一个1代表读取错误,第二、三位代表电机错误信息(00 01 03),第四位表示错误的电机标号(0 1 … F)。例如 |
|
0x2000 |
电机指令无法下发,一般会报错:No buffer avalible |
|
0x100 |
不能切换四足 |
|
0x200 |
不能解锁 |
|
0x385 |
指拼接件的can线数据异常,有可能can线未接,线材断裂 |