D1 各模块OTA
本章节介绍D1各模块OTA升级方法。
一、D1 ros2
升级前请先确认机器人运行正常,并确认机器人处于趴下状态。注意:更新之前关闭48v电源,只留12v,否则机器人容易失控
sudo systemctl stop d1_bringup.service
sudo apt update #若安装.deb包失败,请执行此命令,再重新安装.deb包
sudo apt install d1-ros2
# 卸载
sudo dpkg --purge d1-ros2
sudo rm -rf /opt/d1_ros2
#版本检查
dpkg -l d1-ros2
安装后服务放在lib/systemd/system下,新增服务d1_bringup.service
警告
如果用户在开发控制器、新功能时,需要停止上述服务,并且不要进行双足/四足切换。
二、MCU模块OTA
由于MCU模块OTA升级需要使用到OTA升级工具,请先下载OTA升级工具。
sudo apt update
sudo apt-get install motor-upgrade
#注意电脑中是否安装python3-pip 依赖,若无需安装
# 升级MCU模块固件 and 电机固件 指令
sudo systemctl stop d1_bringup.service
otafifth_demo -f $BIN_PATH
# 升级完成后可查询MCU版本
can-app -Version
备注
请注意!为保证升级正常,请先确定机器人运行正常(8个电机都通讯正常),并将机器调为趴下状态。
三、系统恢复出厂设置
注意事项
请仔细阅读使用须知即刷机文档。如开始进行刷机,即视为已阅读下述须知。
该系统的刷机是不可逆的过程,本质上是将系统恢复出厂状态,注意个人数据进行备份。
刷机过程中请勿进行任何操作,请勿断电。
一、准备工作 刷机工具:Ubuntu22.04系统电脑 硬件准备:D1随包装的刷机线(标志A朝外插入DBG口,先插线再上电); 此操作需要将刷机包下载至电脑(必须Linux系统)中,并创建新的文件夹,将刷机包解压至新建的文件夹中。
# in ubuntu22.04 host computer
sudo apt install abootimg binfmt-support binutils cpio cpp device-tree-compiler dosfstools
lbzip2 libxml2-utils nfs-kernel-server openssl python3-yaml qemu-user-static
sshpass udev uuid-runtime whois rsync zstd lz4
# 全部复制,这是NVIDIA刷机所需要的依赖,请首先将以上依赖安装在刷机的电脑中,而不是机器人
Download apollo-ubuntu-${date}.tar (下载对应日期的系统软件包;目前最新系统包可找我司FAE同事获取)
mkdir apollo-ubuntu(可在电脑系统的任意位置创建文件夹)
tar -xf apollo-ubuntu-${date}.tar -C apollo-ubuntu (解压系统软件包至新建文件夹中)
二、开始刷机 进入刚刚创建的文件夹
cd apollo-ubuntu
sudo ./flash_robot.sh 注意!部分Ubuntu中可能缺少sshpass和nfs-kernel-server两个插件,缺哪个装哪个


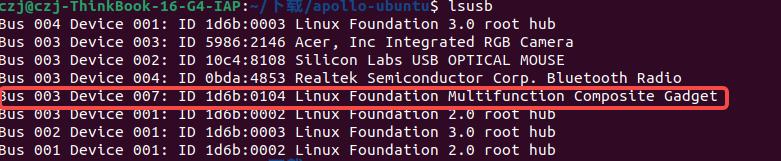
三、结束标记 刷机完成时可以看到以下信息
并且输入指令lsusb能看到这个信息
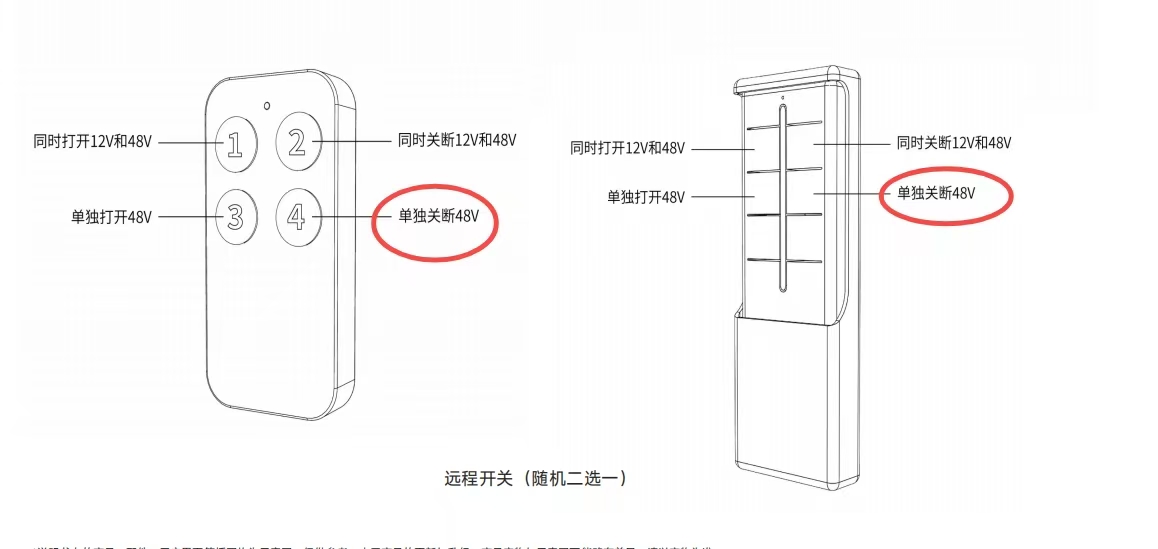
遥控器固件升级
工具准备: windows系统(11以上)、USB-C数据线
操作步骤
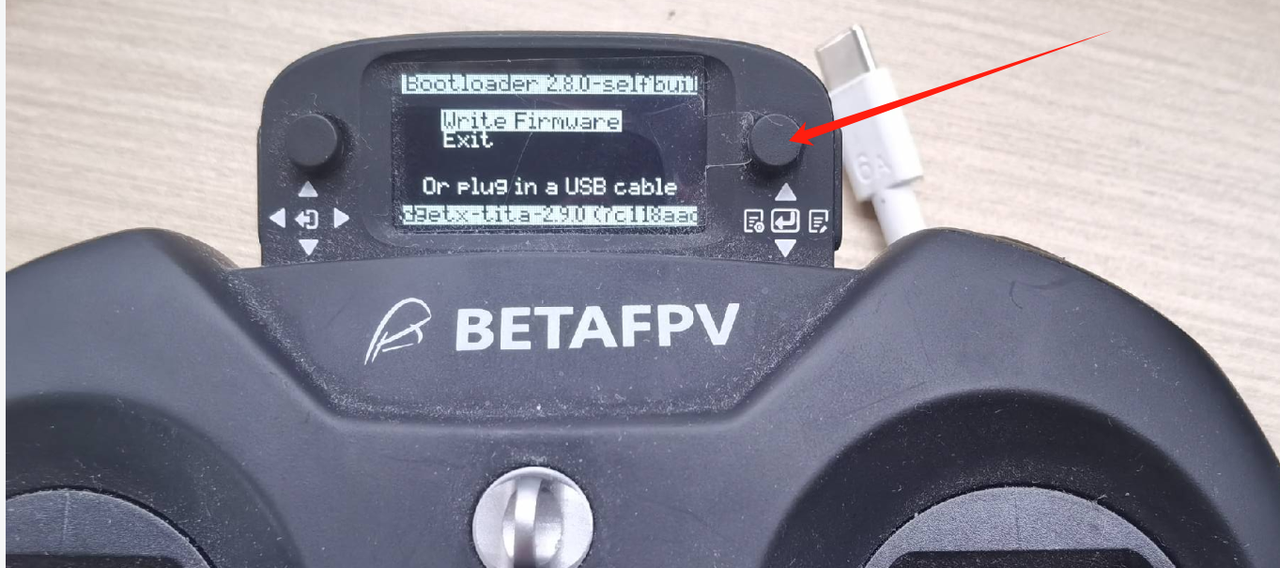
1.使手柄进入固件更新模式
(1) 同时按下以下两个地方的按钮,如图

 (2)按下按钮后会进入如图界面,即成功进入固件更新模式
(2)按下按钮后会进入如图界面,即成功进入固件更新模式
 2.开始更新
(1)使用USB-C数据线连接手柄与电脑,电脑会弹出U盘界面(该界面是手柄内置存储器的界面)
2.开始更新
(1)使用USB-C数据线连接手柄与电脑,电脑会弹出U盘界面(该界面是手柄内置存储器的界面)
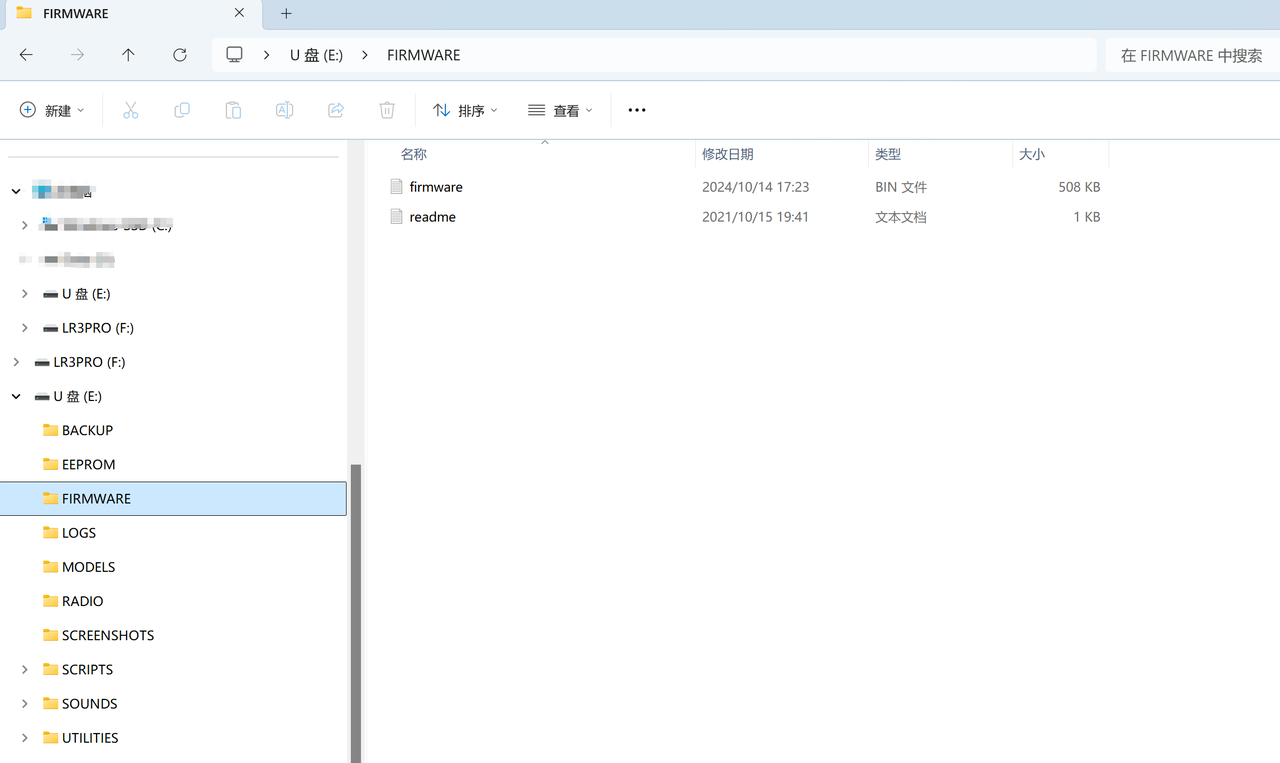 (2)将最新的
(2)将最新的firmware.bin放到FIRMWARE目录下,如上图所示。(Ps.若没有手柄固件或最新固件的用户可联系我司售后工程师索要。)
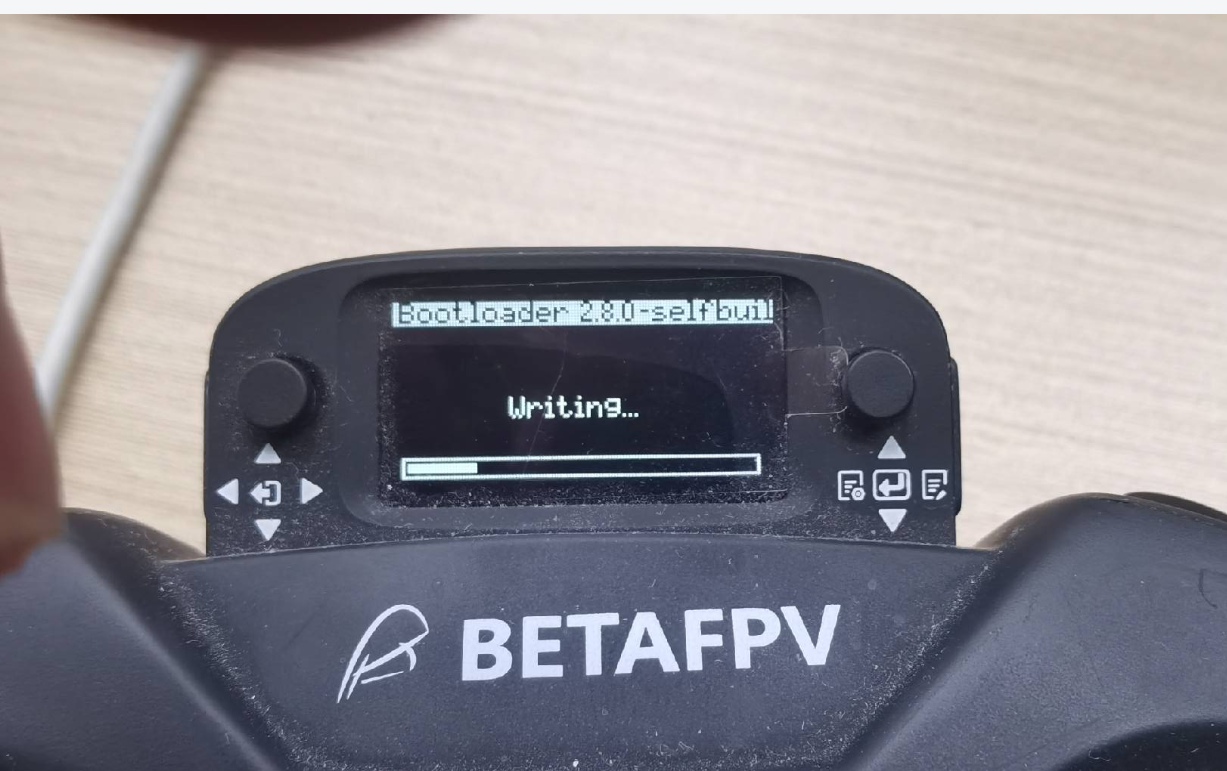
(3)将USB-C数据线与手柄断开,按下右边按钮,一直按着直到手柄界面出现writing的界面,即在烧写固件中。随即请耐心等待其烧写完毕出现Writing Complete的界面。如图
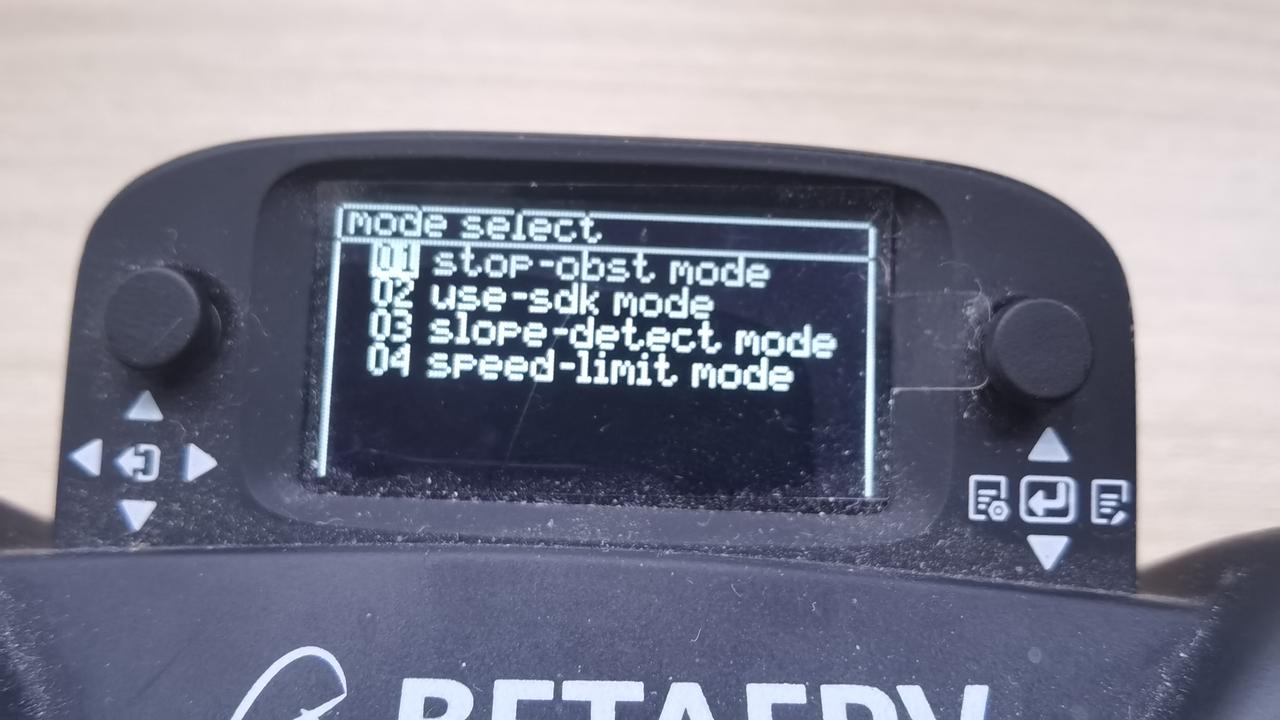
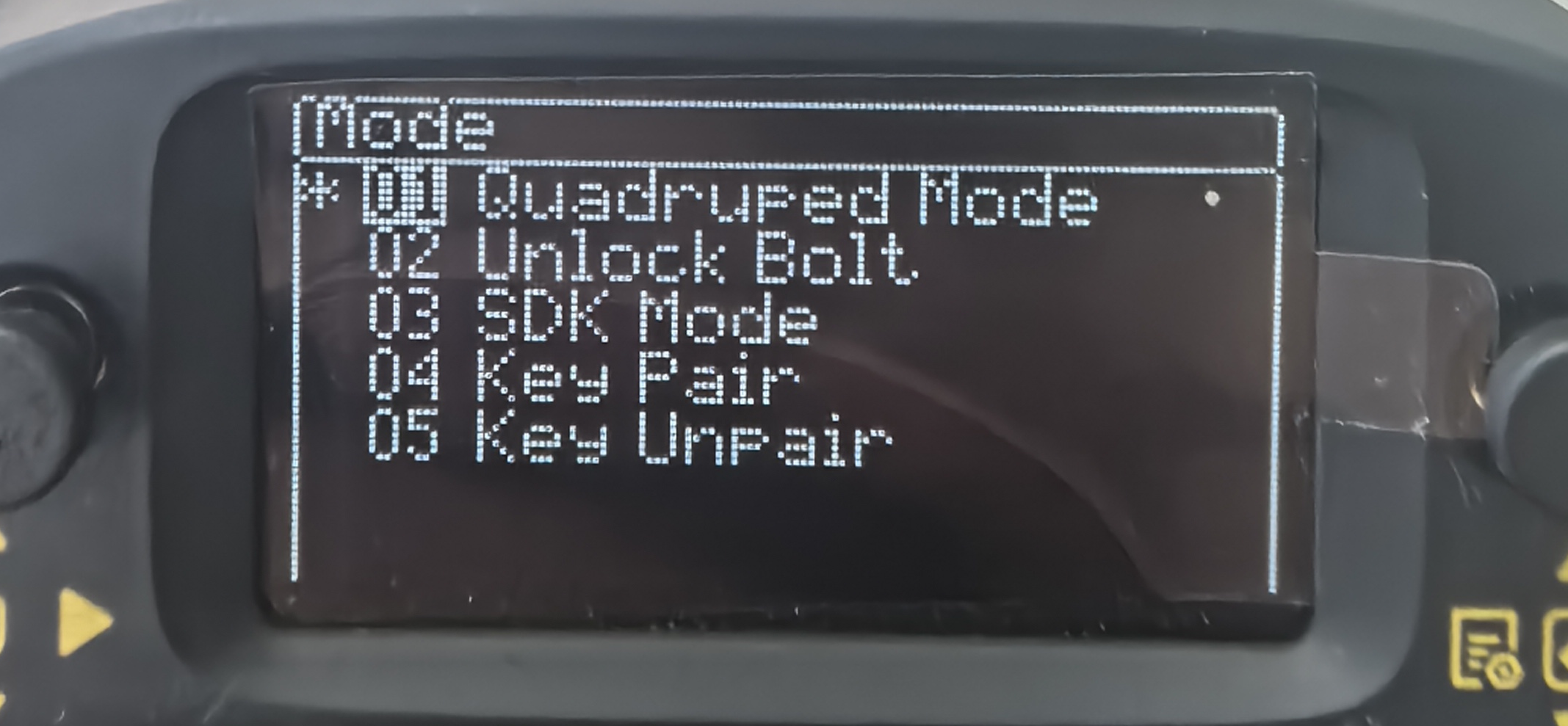 (4)随后按下开关机键重启手柄,按下右边按钮,朝中间按下,会出现
(4)随后按下开关机键重启手柄,按下右边按钮,朝中间按下,会出现mode select界面
 3.更新接收机
完成以上步骤就是完成了第一阶段固件更新!
3.更新接收机
完成以上步骤就是完成了第一阶段固件更新!
接下来就是更新接收机的时候。
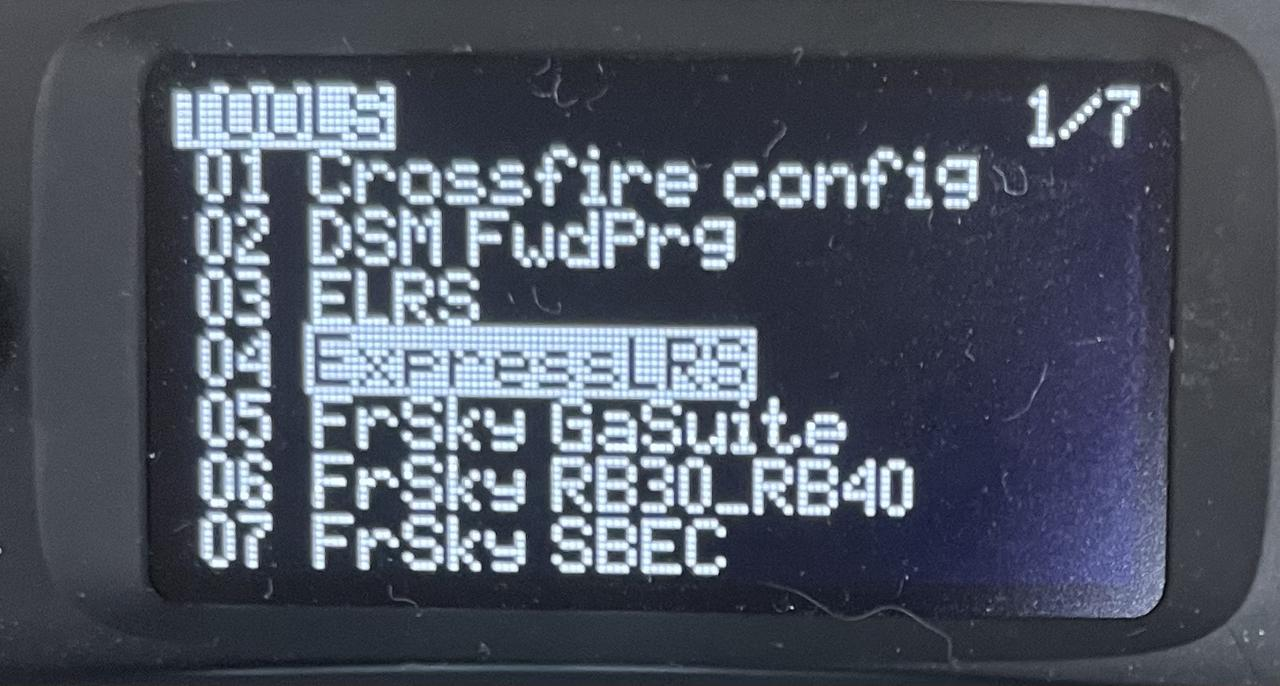
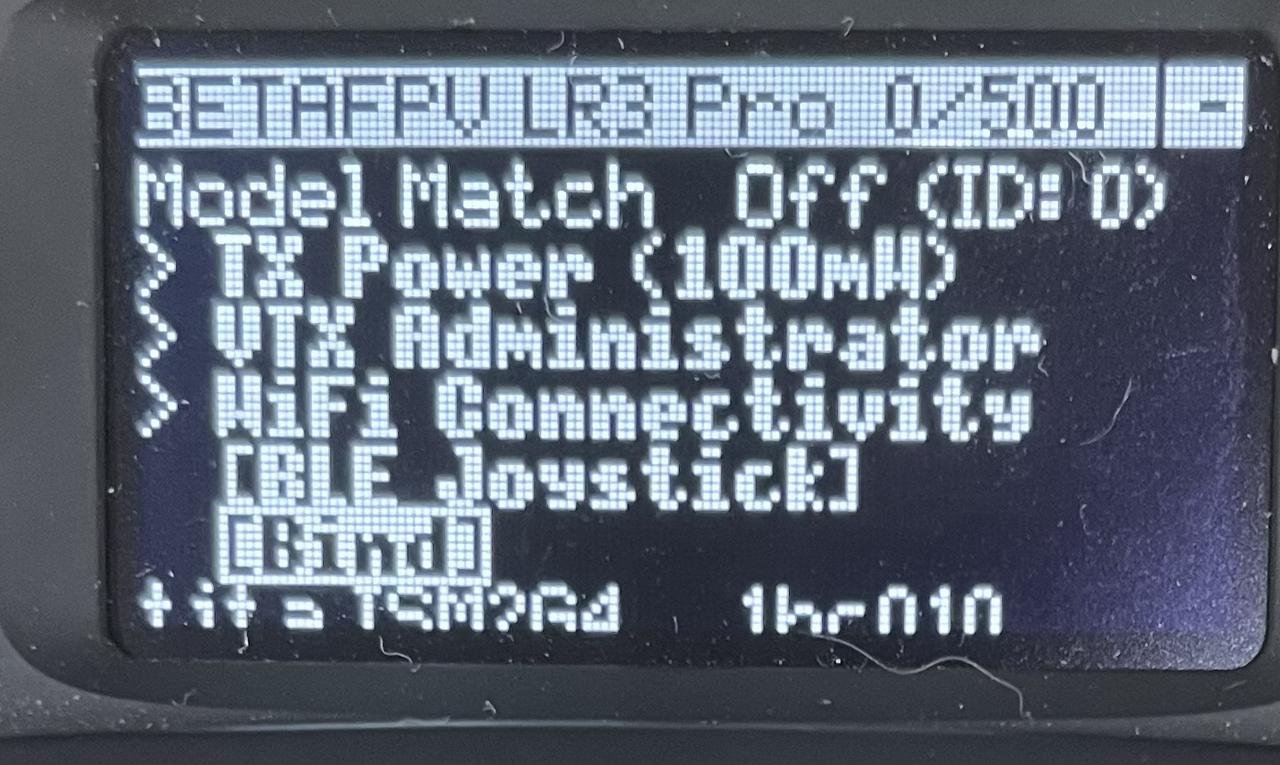
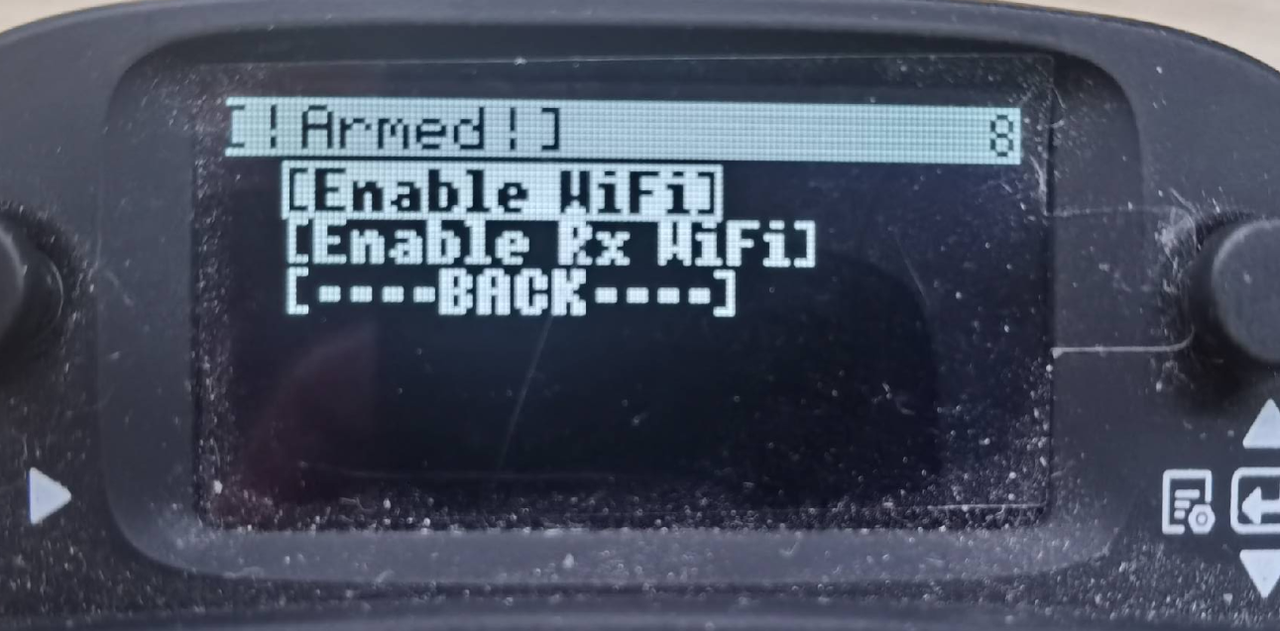
(1)首先遥控器开机后,右边按键向左推进入界面后 按键依次进入Tools ->ExpressLRS->wifi connectiving->Enable wifi
 (2)电脑连接wifi ,wif账号:ExpressLRS TX 密码为:expresslrs
连接WIFI后,浏览器会弹出update Web端,如果弹不出,手动输入10.0.0.1,同时确保wifi正常连接
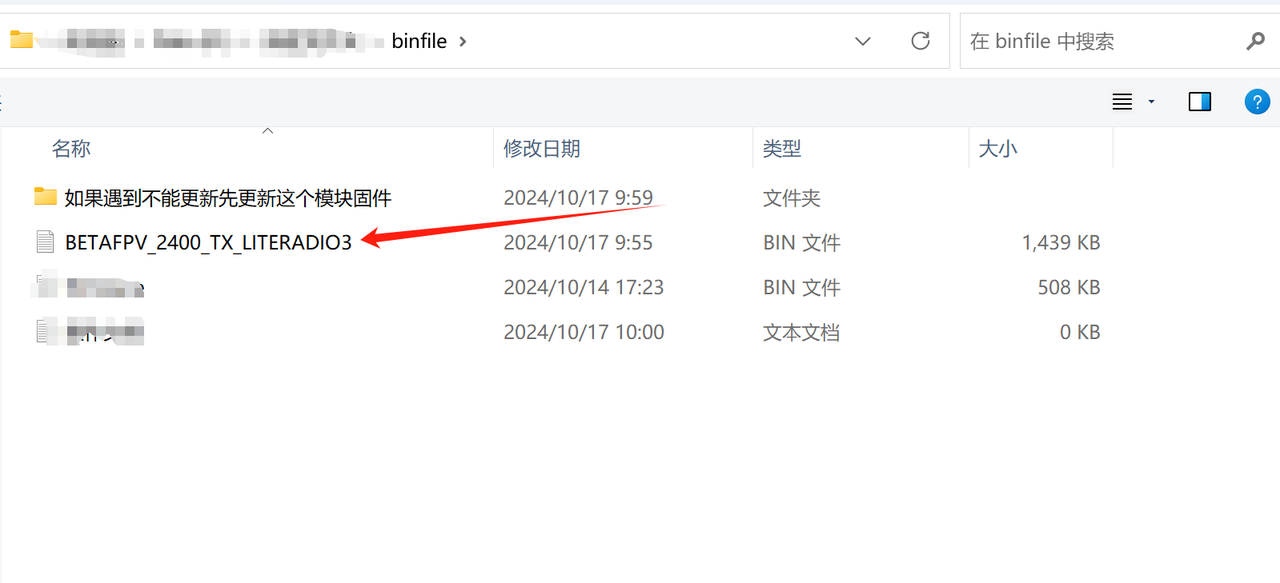
并选择要更新文件
(2)电脑连接wifi ,wif账号:ExpressLRS TX 密码为:expresslrs
连接WIFI后,浏览器会弹出update Web端,如果弹不出,手动输入10.0.0.1,同时确保wifi正常连接
并选择要更新文件
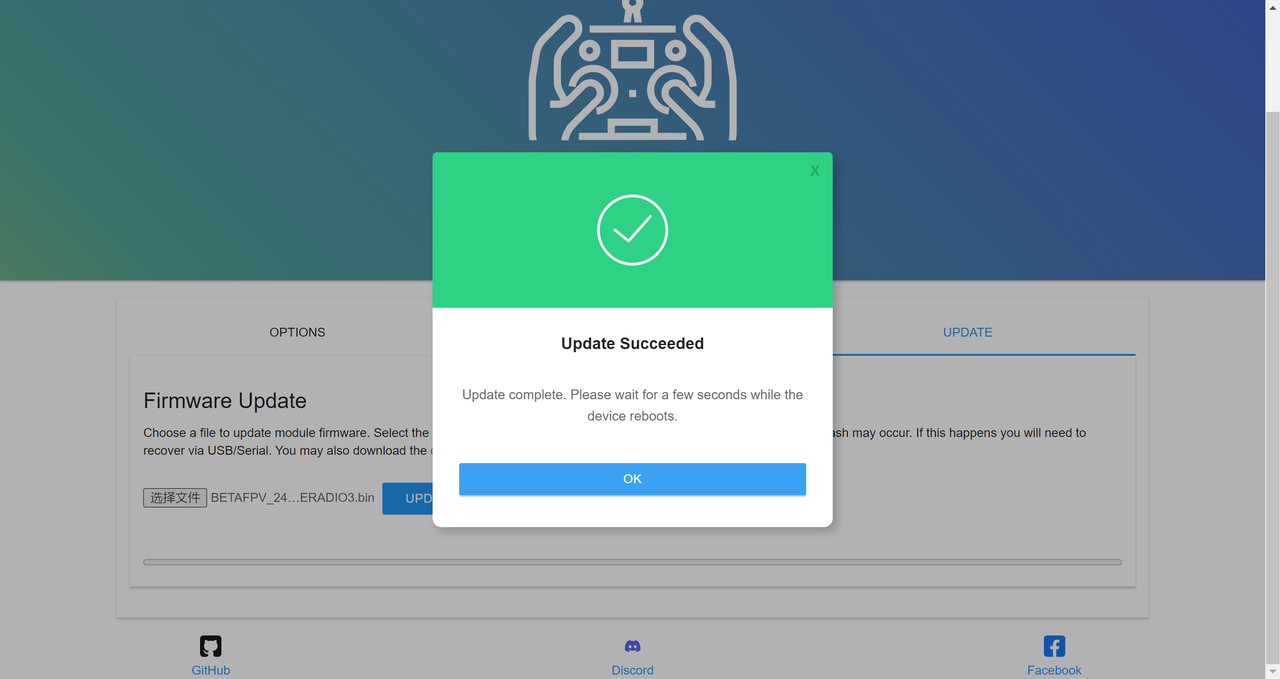
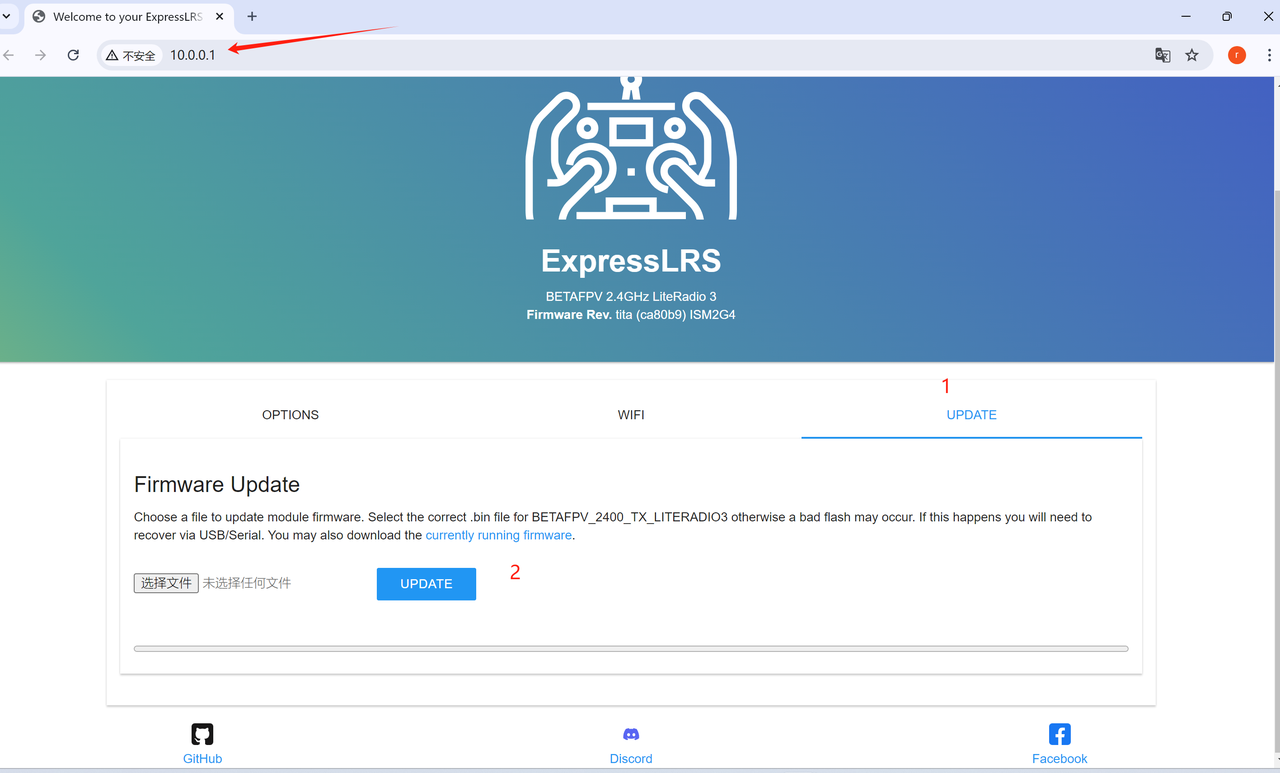 (3)点击UPDATE, 如果更新不成功,如上图,先更新第一文件夹的模块
(3)点击UPDATE, 如果更新不成功,如上图,先更新第一文件夹的模块
 (4)更新成功会有如图界面
(4)更新成功会有如图界面
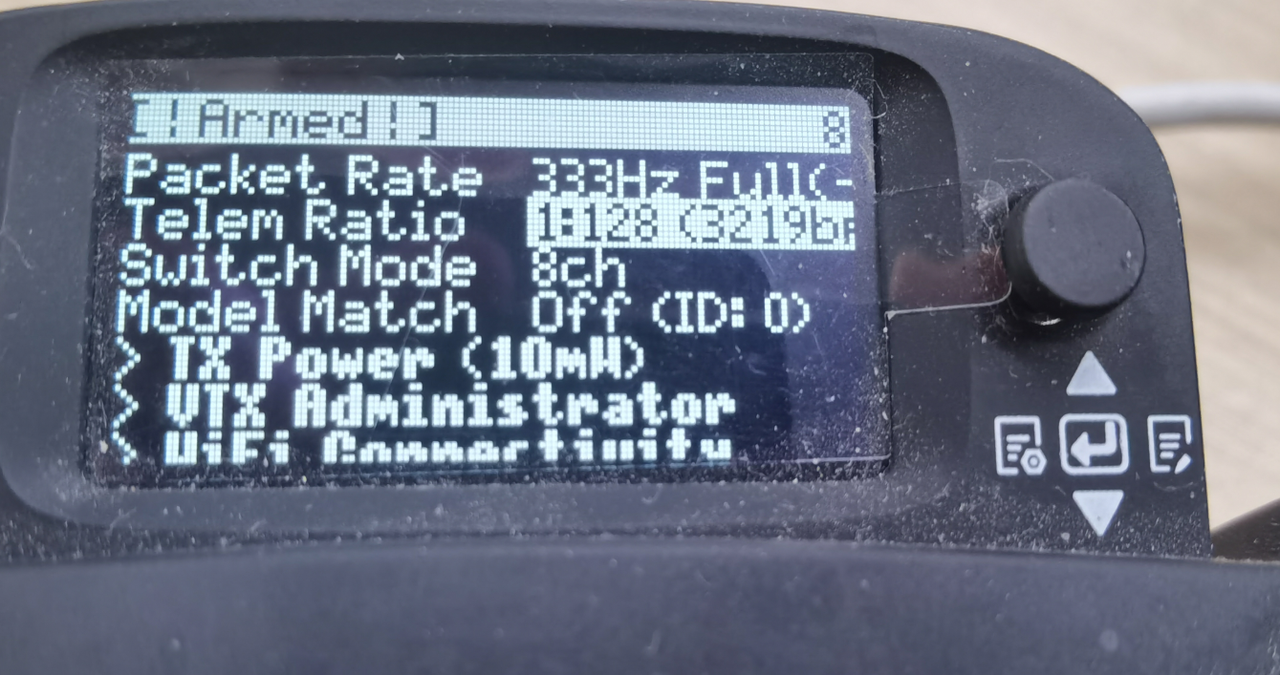
 (5)完成以上步骤完后,重启手柄,配置遥控器控制速率,右边按键向左推进入界面后 按键依次进入Tools ->ExpressLRS->Telem Ratio 1:128 (按下选中,出现闪烁,说明选中),如图
(5)完成以上步骤完后,重启手柄,配置遥控器控制速率,右边按键向左推进入界面后 按键依次进入Tools ->ExpressLRS->Telem Ratio 1:128 (按下选中,出现闪烁,说明选中),如图
 (6)向下推,至1:8,按下中间确定,配置完成!
(6)向下推,至1:8,按下中间确定,配置完成!
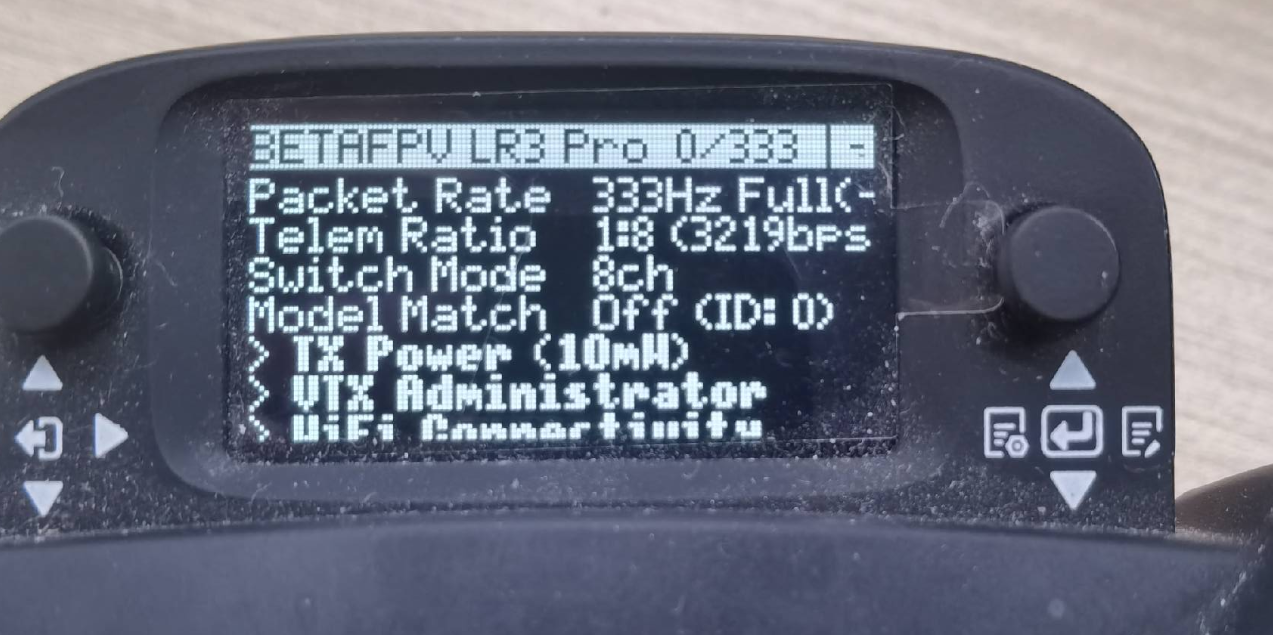 至此手柄固件已全部升级完成!!
至此手柄固件已全部升级完成!!