常见问题
机器人连接处异响
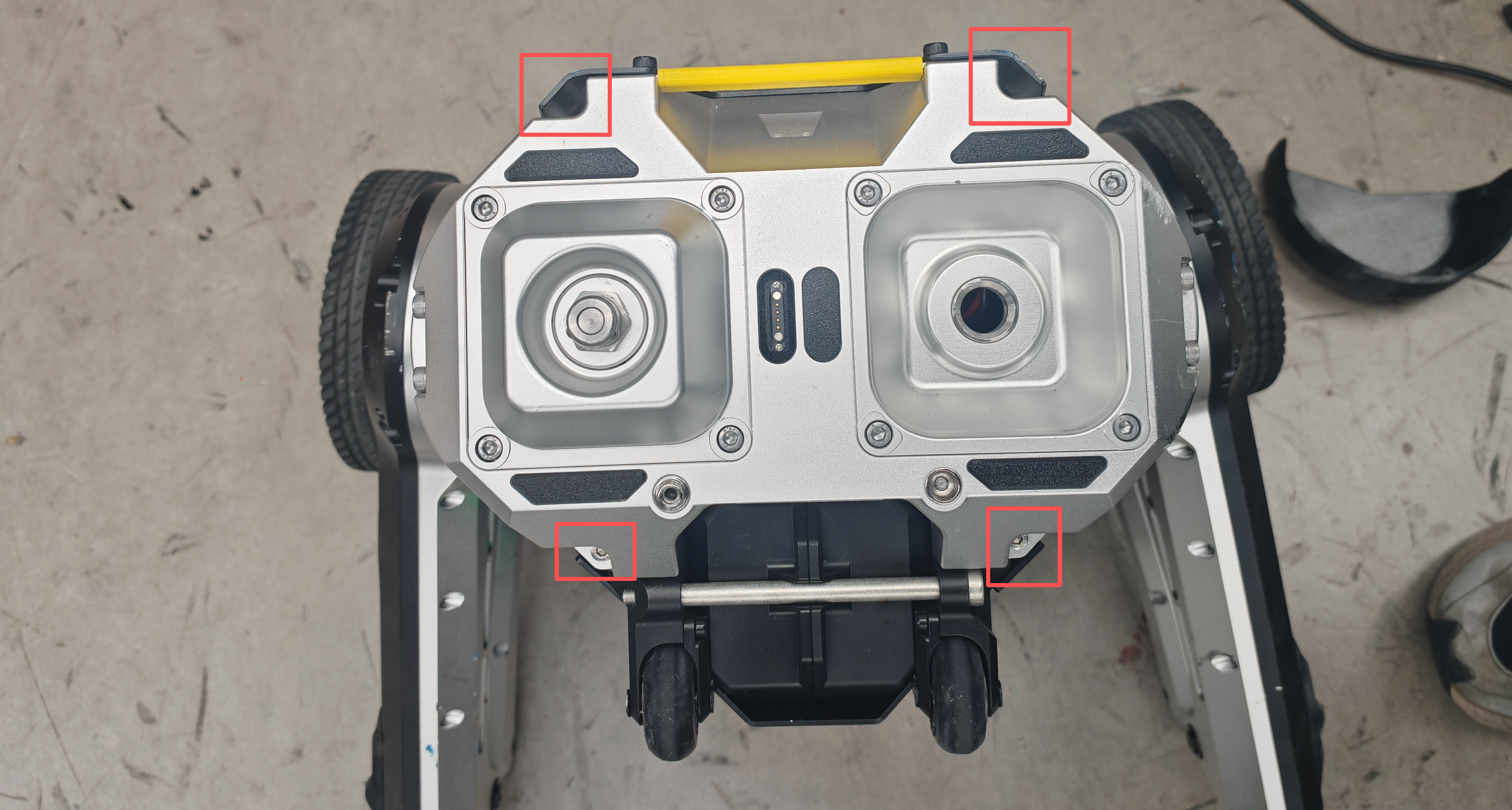
若听见机器人连接处有异响,可能是由于连接机构螺丝松动导致,为了方便对接机构快速拆装/替换,因此连接处螺丝并未使用防松措施,用户可以在使用中定期检查连接处螺丝的紧固情况,如有松动请使用内六角扳手进行紧固.
腿部零位校准
robot@d1:~$ ros2 run canfd_api leg_zero_calibration -h
Usage: leg_zero_calibration [options]
Options:
-c, --can-interface CAN interface name (default: can0)
-r, --read Read joint status
-l, --leg Leg name (left/right) (default: left)
-h, --help Show this help message
校准零位 先分开主从机,依次校准,终端输入:
ros2 run canfd_api leg_zero_calibration -l left
Please place the left leg at the zero position, then press Enter...
先将对应腿摆到机械零位上,如下图,然后回车…
 另一条腿将left换成right即可,重复上述步骤。然后重启机器
另一条腿将left换成right即可,重复上述步骤。然后重启机器
打印当前位置与机械零位的差值,可以查验下校准是否ok
ros2 run canfd_api leg_zero_calibration -r
# Read joint imu status...
# motor[0] Kinematics Position: 0.229697 Mechanical Position: -0.555701
# motor[1] Kinematics Position: 1.29583 Mechanical Position: -2.10756
# motor[2] Kinematics Position: -2.75634 Mechanical Position: -1.88839
# motor[3] Kinematics Position: -2.69203 Mechanical Position: -2.69203
# motor[4] Kinematics Position: -0.237942 Mechanical Position: 0.547456
# motor[5] Kinematics Position: 1.29602 Mechanical Position: -2.10737
# motor[6] Kinematics Position: -2.75768 Mechanical Position: -1.88973
# motor[7] Kinematics Position: -2.32942 Mechanical Position: -2.32942